Newer devices
Starburst Turret
How to build things like this
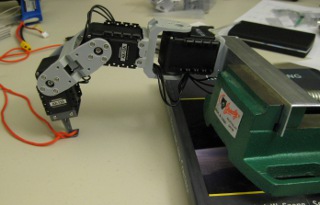
Airsoft Gun Robot
About Me
Luke Allen's Webpage
This is my personal web page, featuring several of the devices I've built. I've tried to describe them all in a way that will be accessible to hobbyists or first-year engineering students. Newer projects are on this page; older projects are on the left. (And a modern web layout is in the future...)
Bbot drink delivery robot

My most recent robotics project is a robot that delivers food and drink. It drives along a track on the ceiling and lowers a drink-carrying basket at your table. It made its first delivery on January 17, 2017 at Folsom Street Foundry in San Francisco. Here are videos of the final version in testing and in operation at the Tokyo Kitty karaoke bar in Cincinnati, Ohio.
The robot is controlled by a Raspberry Pi and a custom motor controller board. The contactless ordering software that we built for the robot is the central product of my startup, Bbot (update: Bbot was purchased by DoorDash in 2022. I'm now working on a new startup, which is quite apparently a higher priority to me than modernizing this website. This is how all websites used to look, kids).
Hexapod first steps

This page continues my hexapod robot project; I've combined 6 of the legs discussed below into a hexapod robot, which can choose its footsteps to move its body in a given direction. The next step is to add sensing so it can climb around intelligently.
Converting prose to poetry
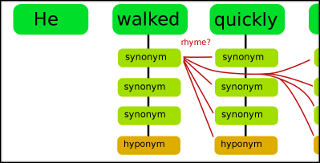
I wrote a program that takes arbitrary English text and paraphrases it into a rhyming poem. (I wrote it as a class project in Natural Language Processing at Stanford.) Results are mediocre, but the methods in it may be useful to other people.
Finding force on the tip of a robot leg
This page continues my robot leg project below. It goes through the physical reasoning of how to calculate force at the foot, using the joint torques that are reported by the AX-12 servos. It describes the general method to convert joint torque into force, plus one possible way to account for the errors caused by the rather inaccurate torque estimates that the AX-12 gives.
Hexapod Robot Leg Mod 1, using the AX-12 robotics servo

In the second version of my robot leg I switch to the AX-12 servo, which is designed for robotics applications. The new leg works smoothly and precisely. The page also includes Java code to talk to the AX-12 through the manufacturer's USB2Dynamixel device or through a PIC microcontroller.
Hexapod Robot Leg
This is my first iteration of a robot leg, for eventual use in a hexapod robot. It's able to move its foot to a commanded x,y,z position, using hobby servos controlled by a PIC. It works but demonstrates some problems with using hobby servos.
PIC C programming tutorial

This tutorial shows you how to program Microchip PIC microcontrollers using Microchip's free C compiler and the PIC 18F1320, which is a newer PIC with a lot of cool features. The BASIC Stamp and Arduino are easier to learn, but if you want a cheap and highly capable microcontroller that you can leave in your projects when you're done, you can't beat the PIC.
Google Android games

I got an Android phone, and decided to learn Android programming. The first game I made was rudimentary, but the second game I released, Atomic Bomber, has done pretty well. (The page doesn't have a guide to Android programming, because far better ones exist than I could produce. Android programming is just Java, with Android-specific functions for drawing images, playing sounds, etc.) I recently also learned iPhone programming and ported Atomic Bomber to iOS. If you're new to smart phone programming, I recommend starting with Android, as the language and development process are easier.
Compact Coilgun

An electromagnetic projectile launcher small enough to be concealed in a disposable camera case.
Whistle-activated switch
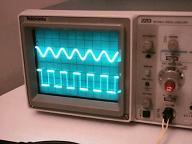
A circuit that detects when there's a steady tone in the air within a certain frequency range (i.e. the range I can whistle). I made it activate a relay to turn my bedroom lights on and off.